Micro:bit robot
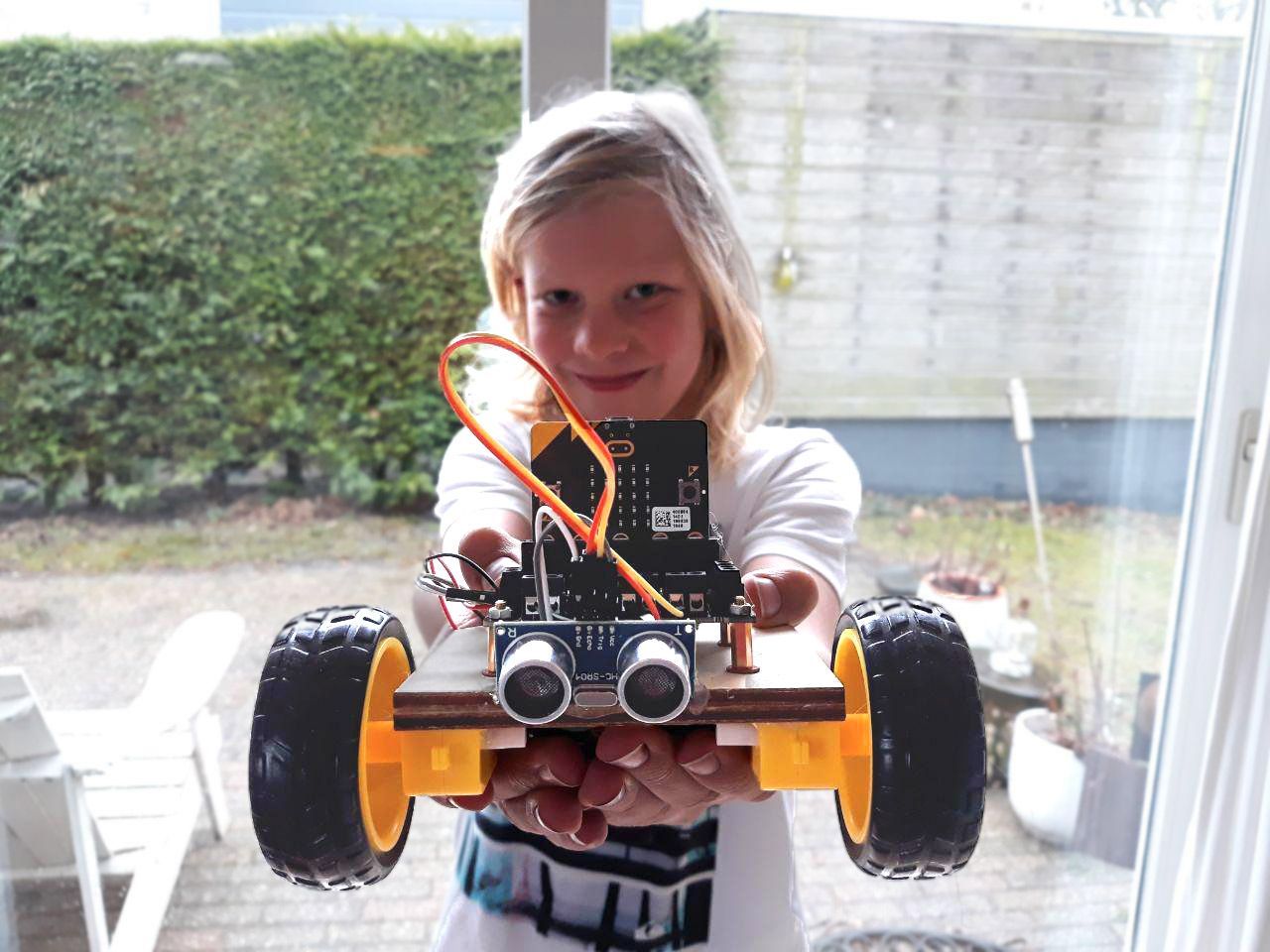
We hebben een robot gemaakt van met een Micro:bit, wanneer de robot een object voor zich ziet gaat hij draaien totdat er weer ruimte voor hem is om recht door te rijden.
Om de motoren met de microbit te kunnen aansturen hemmen we een extra motor controller bord gebruikt:
https://www.kitronik.co.uk/5620-motor-driver-board-for-the-bbc-microbit-v2.html
Voor de aansturing van de echo sensor hebben we een extra library gebruikt voor de microbit:
http://www.makerspace-uk.co.uk/hc-sr04-ultrasonic-sensor/
De basisplaat van de robot is op de lasersnijder gemaakt.
Het programma is hier te downloaden:
https://kaasfabriek.nl/download_file/185/0
Project informatie
- Projectnaam: Micro:bit robot
- Maker: